
與傳統的慣性導航系統相比,由MEMS陀螺和MEMS加速度計構成的微慣性導航系統在成本、體積、重量等方面均具有顯著優勢,在飛機、導彈和艦船等軍事及民用領域均具有廣闊的應用前景。由于技術水平的局限,現今基于MEMS技術的微陀螺精度還不是很高,與光纖陀螺還有數量級的差距,但價格與之相比卻非常低。MEMS加速度計是所有MEMS傳感器中商業化應用最成功的,精度上已經能夠滿足軍事應用要求。在此使用目前市場上的MEMS加速度計和低精度 MEMS陀螺來設計低成本微慣性導航系統,可用于對精度要求不高,但對成本比較敏感的領域,如小型無人機等。
1 微慣性導航系統硬件設計
設計的微慣性導航系統硬件主要包括MEMS慣性傳感器及信號調理模塊、信號采集處理與傳輸模塊、導航計算機及顯示模塊。其結構框圖如圖1所示。微慣性傳感器是慣性導航系統的核心敏感器件,其誤差是導航系統的主要誤差來源,其精度直接決定了導航的精度。
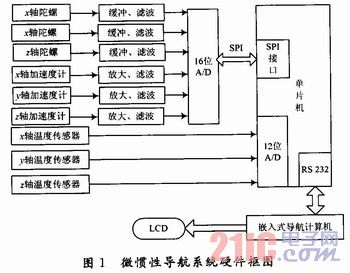
選擇ADI公司的ADuC842單片機,該單片機主頻可達16.67 MHz,片上自帶8路12位A/D,可用于溫度傳感器信號的采集,并完成陀螺和加速度計信號的讀取、預處理以及溫漂補償等操作,最終通過RS 232與導航計算機通信。
1.1 微慣性傳感器模塊
MEMS慣性傳感器模塊中的三軸陀螺由ADI公司3個單軸MEMS角速度傳感器ADXRS150組成,其角速度范圍為150°/s;三軸加速度計采用 ADI公司的MEMS加速度傳感器ADXL103和ADXL203組成,其中ADXL103是單軸加速度傳感器,ADXL203是單芯片雙軸加速度傳感器,將其正交放置組成三軸加速度計來測量運行載體沿其正交軸方向的線加速度。所選陀螺及加速度計均采用微機械技術,性能優越、價格低廉,具有較高的性價比。根據慣性傳感器信號特點及A/D輸入范圍,系統的信號調理模塊主要包括信號的放大和低通濾波處理。選擇具有高精度、零漂移、軌對軌特點的運算放大器作為信號放大及緩沖器來滿足設計需要;陀螺性能好壞主要取決于陀螺漂移,而陀螺噪聲是引起陀螺漂移的一個重要因素,在此設計的陀螺工作帶寬在40 Hz,設計中增加了低通濾波器電路,以濾除40 Hz以外的干擾噪聲。
1.2 信號采集處理與傳輸模塊
根據慣性傳感器特性,在留有余度的基礎上選用16位高精度A/D采集芯片ADS8344,其8個通道循環采樣,轉換速率可調且最大為100 kHz,采用SPI接口與CPU通信。考慮運算速度及方便使用,CPU選擇ADI公司的ADuC842單片機,該單片機主頻可達16.67 MHz,片上自帶8路12位A/D,可用于溫度傳感器信號的采集,并完成陀螺和加速度計信號的讀取、預處理以及溫漂補償等操作,最終通過RS 232與導航計算機通信。
1.3 導航計算機
捷聯式慣性導航算法非常復雜,運算量很大,需建立“數學平臺”以代替平臺慣導的機械平臺。為滿足系統的實時性要求,選擇臺灣昭營科技的主頻1.2 GHz,內存512 MB的嵌入式小型計算機eBox4850作為導航計算機,可以很好地滿足要求。
2 信號預處理
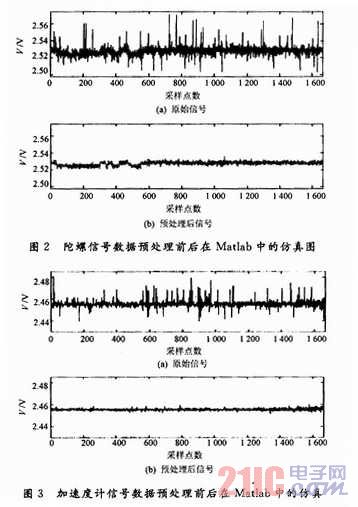
微慣性傳感器,尤其是微陀螺技術目前還不是很成熟,低成本的MIMU在性能和精度上都存在較大的缺陷,野值比較明顯,噪聲水平也比較高。利用先前已在MEMS陀螺降噪方面所做的工作,在此先在單片機中對信號做預處理,再利用降噪算法在導航計算機中進行陀螺降噪,最后完成導航解算,以獲得較好的處理效果。考慮單片機系統的處理能力及實時性,本文采用均值濾波算法做預處理,即對每組采集的7個數據,首先去除最大值x(1)和最小值x(7),剩余數據記為x(2),x(3),x(4),x(5),x(6);然后將x(2),x(3)的均值,x(3),x(4),x(5)的均值,x(5),x(6)的均值再平均后作為預處理后的輸出數據。
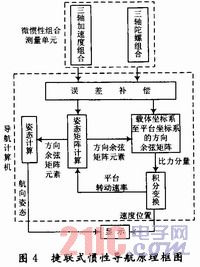
目前已經廣泛應用到眾多導航設備中。姿態更新計算是捷聯式慣導的關鍵算法,主要有歐拉角法、方向余弦法和四元數法。其中四元數法具有計算量小、精度高、可避免奇異性等優點,本文采用此方法作為姿態更新算法。圖2、圖3為陀螺及加速度計靜態信號在數據預處理前后在Matlab中的仿真圖,由圖可見,均值濾波預處理算法效果較好,其中的奇異值基本消除。
3 捷聯解算(SINS)
在此設計的捷聯式慣性導航系統工作原理圖如圖4所示。將MEMS陀螺和MEMS加速度計直接固聯在運載體上,通過導航計算機依靠算法建立導航坐標系,即平臺坐標系以數學平臺形式存在,省略了復雜的物理平臺,具有結構簡單、體積小、重量輕、成本低等優點。
3.1 姿態矩陣
設導航坐標系為n,運載體坐標系為b,俯仰角δ、橫滾角θ、航向角φ,由導航坐標系至運載體坐標系的姿態變化矩陣為:

3.2 四元數即時修正及歸一化
設載體坐標系相對導航坐標系的轉動四元數為公式(1),其中Wx、Wy、Wz為經過補償后的3軸捷聯MEMS陀螺輸出。

在更新過程中,由于存在計算誤差,姿態矩陣成為非正交陣,因此需要正交化處理以消除非正交引起的算法誤差,處理方法為用式(3)中的替換Q中的相應qi即可。

3.3 姿態矩陣的計算
經過式(2),式(3)實時計算出四元數后,由對姿態矩陣更新計算,再通過即可獲得載體更新的姿態角。

3.4 速度位置的計算
加速度測量的比力信息fx,fy,fz,通過姿態矩陣轉化到導航坐標系后記為Fx,Fy,Fz,轉換由式(4)確定。東北天方向的速度VE,VN,VU由對加速度做積分運算確定,經度λ、緯度φ高度h由對速度做積分運算確定,分別見公式(5),式(6)。

![]()
4 實驗結果及分析
為了測定所設計的低成本捷聯式慣性導航系統的性能和精度,進行了大量的實驗室靜態測試,圖5,圖6,圖7為原理樣機實時運行20 s的靜態測試結果。由圖可知,樣機靜態運行15 s,姿態誤差最大為1.2°,速度誤差最大為4.5 m/s,位置誤差最大為33 m。分析實驗結
果可知,樣機運行在較短時間內,捷聯解算結果良好。但是長時間運行,誤差發散比較嚴重,主要原因有2個,其一是考慮低成本設計,所選用的MEMS慣性傳感器精度比較低,與普通導航所用的慣性傳感器精度有數量級的差距;其二,選用的導航方式為捷聯式慣性導航,而捷聯式系統為發散系統,本身誤差有積累效應,時間越長誤差越大。


5 結語
在此首先介紹了采用MEMS慣性傳感器設計的微慣性測量單元。由于選用的微慣性傳感器精度比較低,信號存在較大的噪聲,個別點出現野值現象,所以引入信號預處理。根據陀螺及加速度計測量的實時信息,通過“四元數”法,完成導航解算,輸出運載體的航向速度及位置信息。分析實驗結果可知,此系統短期精度較高,但誤差隨時間發散非常快,為保證長時間使用,可以采用SINS/GPS組合導航方式,通過卡爾曼濾波來抑制發散,提供測量精度,這也是我們以后工作的重點。