
隨著微處理器的發展,利用微處理器對工業生產過程進行控制已成為趨勢。在工業控制過程中,由于大量數據信息的共享和傳輸,傳統的串行通信模式已不能滿足要求。在工業控制領域中,需要一種抗干擾性強、可靠性高、傳輸速度快和傳輸距離長的總線結構。CAN總線技術不僅滿足上述要求,而且還能實現多點間的信息傳遞。本文使用PCI9810-cAN適配卡上的CAN總線組成局域網絡,實現多微處理器間的信息傳遞和PC機對多處理器的檢控、通信。
1 CAN總線簡介
CAN(Controller Area Networks)總線,最早是由德國Bosch公司開發用于局域網控制的總線技術。CAN總線采用傳統的雙線串行通信方式,具有診斷能力,抗電磁干擾,其最陜傳輸速率可達1 Mb·s-1,最長通信距離可達10 km(此時的傳輸速率大約為40 kb·s-1)。在CAN總線組成的局域網絡中,通信節點之間不采用主從方式,而是具有總線訪問優先權,通信方式靈活,可實現點對點,一點對多點及廣播方式傳輸數據。
2 系統通信模塊的硬件設計
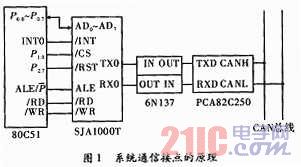
CAN總線是由PCI9810-CAN適配卡提供,本文主要完成通信節點的設計。通信節點不僅可以和PC機進行信息交換,還可獨立與其他各節點通信。微處理器在需要和主機或其它節點通信時,其通過P0口向SJA1000T的寄存器發送信息,再由PCA82C250把信息傳遞到CAN總線上。主機和其他通信節點判斷接收報文的標識符,將對接收到的信息作相應的處理,從而實現通信功能,如圖1所示。
在設計過程中,為了滿足多微處理器間通信的實時性和可靠性要求,結合CAN控制器的特點,對圖1作簡單介紹:
(1)收發器PCA82C250的引腳8(Rs)有3種工作方式:高速,斜率控制和待機。斜率控制方式具有抗射頻干擾的功能,所以采用47 kΩ的電阻連接引腳8,實現斜率控制方式。
(2)圖1中應為兩個高速光電耦合隔離器件6N137,由于6N137輸出引腳的驅動能力不夠,需要連接一個約390 Ω的上拉電阻,以增加輸出引腳的驅動能力。兩個光電耦合隔離器件6N137的電源信號采用5 V的DC-DC隔離模塊WRA0505P,以增強系統的抗干擾能力。
(3)收發器PCA82C250的CANH和CANL引腳各自由通過一個5 Ω的電阻與CAN總線相連,電阻起到一定的限流作用,保護PCA82C250免受CAN總線上的過流沖擊。
(4)收發器PCA82C250的CANH和CANL引腳與電源地之間分別反接一個保護二極管和30 pF的電容,可以起到CAN總線的過壓保護作用和過流沖擊。
(5)CAN控制器SJA1000T輸入方式有2種:Intel輸入方式和Motorola輸入方式。在此采用Intel輸入方式,所以SJA1000T的MODE引腳接高電平。
(6)設計僅用到TX0和RX0引腳,根據SJA1000T通信協議所要求的輸入/輸出邏輯電平關系,SJA1000T的TX1腳懸空,RX1引腳的電位必須維持在0.5 Vcc以上,所以在TX1引腳接上約6.8 kΩ和3.6 kΩ分壓電阻。
(7)微處理器C51的引腳P2.7接CAN控制器SJA1000T的片選信號/CS,可知CAN控制器SJA1000T的寄存器首地址為8000H。處理器C41和CAN控制器SJA1000T共用12 MHz的晶振,以提高通信速率。
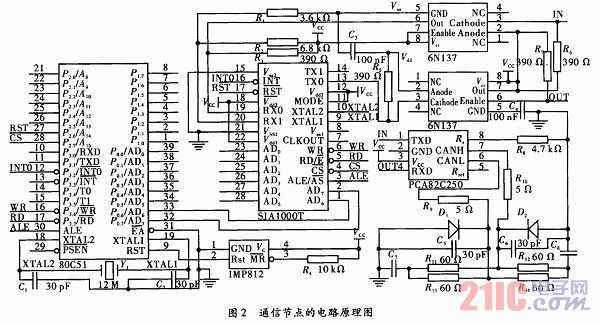
通過上述分析,設計的電路原理圖,如圖2所示。
3 系統通信模塊的軟件設計
通信模塊的軟件由3部分組成:初始化程序,發送程序和接受程序。僅這3部分程序,就能完成通信節點間信息的傳遞。要將CAN總線應用于更復雜的通信系統中,還要考慮CAN總線的錯誤處理,超載處理等功能和節點間的計算方法。由于每個通信節點都有自己的MCU,所以它們之間可以自由通信。通過CAN收發器PCA82C250的引腳CANH和CANL對總線輸出,使總線表現“顯性”,這時可發送信息。判斷總線表現為“顯性”時,就要為接受信息做好準備。
3.1 CAN控制器SJA1000T初始化程序
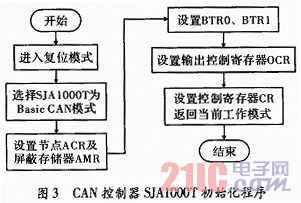
該程序首先進入復位狀態,設置SJAl000T的模式寄存器MR為Basic CAN模式,驗收碼寄存器ACR和屏蔽碼寄存器AMR,再設置定時器0和定時器1,輸出控制寄存器OCR,重新設置控制寄存器CR,返回到正常工作模式下。初始化程序流程圖如圖3所示。
3.2 發送程序
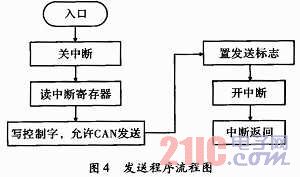
此系統采用中斷方式發送信息,這樣能節省資源,提高通信效率。需要發送信息時,先將信息組合成一幀報文:數據幀或遠程幀。進入發送程序后,首先關閉中斷,保護現場,讀中斷寄存器是否為發送中斷,將報文寫入發送緩沖區,設置命令寄存器允許發送,開中斷。發送程序流程圖,如圖4所示。
3.3 接受程序
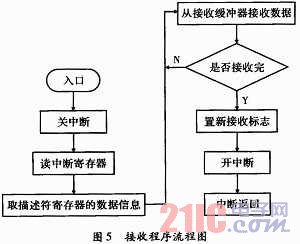
此系統仍采用中斷方式接收信息。接收程序比較復雜,需要對錯誤報警,接收溢出等情況作進一步的處理。信息報文通過CAN總線被送入接收緩存器中,接收中斷被置位,處理器從控制器SJA1000T的緩存器內讀取信息,再設置新的接收標志,開中斷。接收程序流程圖如圖5所示。
4 結束語
把多個通信節點連接到PCI9810-CAN適配卡上的CAN總線,構成一個局部通信網絡,從而實現PC機對多通信節點的檢控和信息傳送,通信節點間的高速通信。在實際中,可以實現約110個通信節點間的通信,但系統比較復雜,通信效率降低,就需要考慮PCI9810-CAN適配卡和通信節點的程序改進和相應算法的應用。在多機通信系統的設計過程中,主要是通過軟件的編寫,提高系統的高速傳輸性。