
在電力網(wǎng)的運(yùn)行中,功率因數(shù)反映了電源輸出的視在功率被有效利用的程度,我們希望的是功率因數(shù)越大越好。這樣電路中的無功功率可以降到最小,視在功率將大部分轉(zhuǎn)換為有功功率,從而提高電能輸送的效率。提高功率因數(shù)必須從相位校正技術(shù)和諧波消除技術(shù)兩個(gè)方面考慮,無功分量基本上為高次諧波,諧波電流在輸電線路阻抗上的壓降會(huì)使電網(wǎng)電壓發(fā)生畸變,影響供電系統(tǒng)的供電質(zhì)量,諧波會(huì)增加電網(wǎng)電路的損耗。解決用電設(shè)備諧波污染的主要途徑有兩種:
一是增設(shè)電網(wǎng)補(bǔ)償設(shè)備(有源濾波器和無源濾波器)以補(bǔ)償電力電子設(shè)備、裝置產(chǎn)生的諧波;二是改進(jìn)電力電子裝置本身,使之不產(chǎn)生或產(chǎn)生很小的諧波,如采用功率因數(shù)校正技術(shù)。兩者相比較前者是消極的方法,即在裝置產(chǎn)生諧波后,進(jìn)行集中補(bǔ)償;后者是積極的方法,也是諧波抑制的重要方法。減小諧波污染、提高功率因數(shù),對(duì)于提高電網(wǎng)電質(zhì)量和用電效率、緩解我國的能源短缺問題等都具有重要的現(xiàn)實(shí)意義。本系統(tǒng)基于MSP430 的高功率因數(shù)電源對(duì)功率因數(shù)校正進(jìn)行了一定的研究,MSP430 是低功耗單片機(jī),將低功耗單片機(jī)與功率因數(shù)校正相結(jié)合具有深層次的研發(fā)意義。
1 系統(tǒng)總體方案設(shè)計(jì)及實(shí)現(xiàn)方框圖
系統(tǒng)主要包括整流、功率因數(shù)校正、Boost 升壓等幾個(gè)部分。電源變壓器將較高的市電電壓降低到符合整流電路所需要的交流電壓,經(jīng)整流電路后得到直流電。將得到的直流電送入Boost 升壓電路進(jìn)行升壓,Boost 電路的輸出電壓極性與輸入電壓極性相同,但總高于輸入電壓,輸入電流連續(xù)、輸出電壓與負(fù)載電流無關(guān),輸出阻抗非常低,通過控制開關(guān)管通斷的占空比來控制輸出電壓。PFC 控制部分采用有源PFC(也稱主動(dòng)式PFC) 功率因數(shù)校正可以實(shí)現(xiàn)高輸入功率因數(shù)和低輸入電流諧波含量,并且開關(guān)管的電壓應(yīng)力和電流應(yīng)力都比較小。電壓適應(yīng)范圍寬,功率因數(shù)高。本系統(tǒng)采用兩級(jí)PFC 技術(shù),即在整流濾波和DC/DC 功率級(jí)之間加入有源PFC電路為前置級(jí),用于調(diào)高功率因數(shù)和實(shí)現(xiàn)DC/DC 級(jí)輸入的預(yù)穩(wěn),該技術(shù)一般用于大功率輸出場(chǎng)合。
MSP430 作為控制和運(yùn)算核心,它具有處理能力強(qiáng),運(yùn)行速度快、資源豐富、開發(fā)方便等優(yōu)點(diǎn)。MSP430 系列單片機(jī)是16 位超低功耗的混合信號(hào)處理器,把許多模擬電路、數(shù)字電路和微處理器集成在一個(gè)芯片上,以提供"單片"解決方案。
MSP430 系列單片機(jī)的電源電壓采用1.8~3.6 V 低電壓,RAM數(shù)據(jù)保持方式下耗電僅0.1 μA,活動(dòng)模式耗電250 μA/MIPS(MIPS: 每秒百萬條指令數(shù)),I/O 輸入端口的漏電流最大僅50 nA, 遠(yuǎn)低于其他系列單片機(jī)(一般為1~10 μA),MSP430系列單片機(jī)堪稱目前世界上功耗最低的單片機(jī),其應(yīng)用系統(tǒng)可以做到用一枚電池使用10 年。系統(tǒng)整體設(shè)計(jì)如圖1 所示。
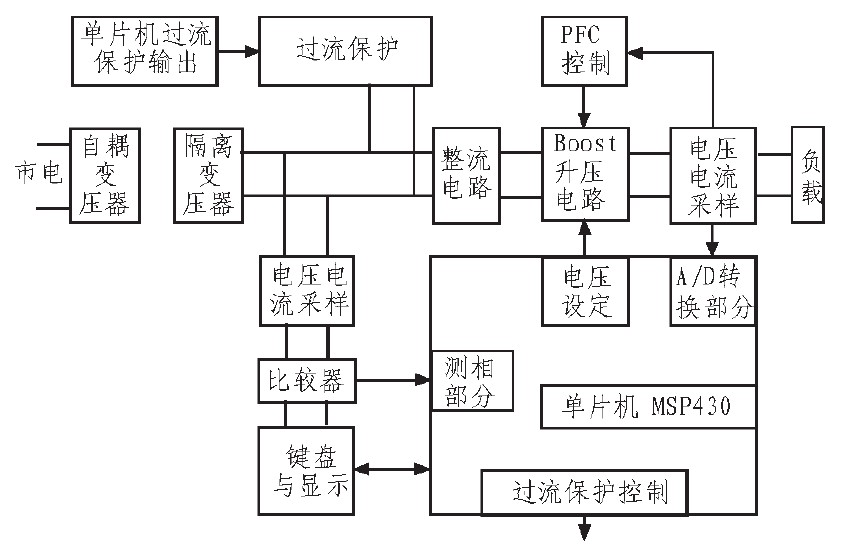
圖1 系統(tǒng)實(shí)現(xiàn)方框圖
2 主要功能電路設(shè)計(jì)
2.1 隔離變壓器部分
本系統(tǒng)中要做好隔離變壓器本身接地的回路,變壓器會(huì)產(chǎn)生漏磁及電磁干擾,如果沒有配置好接地線路,即使做再多的隔離效果也是有限的。把隔離變壓器用在交流電源輸入端時(shí),若電網(wǎng)3 次諧波和干擾信號(hào)比較嚴(yán)重,可以去掉3 次諧波和減少干擾信號(hào), 采用隔離變壓器可以產(chǎn)生新的中性線,避免由于電網(wǎng)中性線不良造成設(shè)備運(yùn)行不正常,非線性負(fù)載引起的電流波形畸變可被隔離而不污染電網(wǎng)。
2.2 功率因數(shù)校正控制電路及數(shù)字設(shè)定電路的設(shè)計(jì)
本系統(tǒng)選用CCM 模式PFC 控制器UCC28019 實(shí)現(xiàn)最終的功率因數(shù)校正,CCM 的輸入電流畸變很小,動(dòng)態(tài)響應(yīng)快,不會(huì)有很高的峰值電流。該芯片通過雙閉環(huán)控制:電流內(nèi)環(huán)和電壓外環(huán)。電流內(nèi)環(huán)的作用是控制網(wǎng)側(cè)輸入電流的波形和相位;電壓外環(huán)的作用是控制輸入電流的幅度,以使輸出直流電壓在各種擾動(dòng)下保持期望值。該控制系統(tǒng)具有許多系統(tǒng)級(jí)的保護(hù)功能,主要包括峰值電流限制、軟過流保護(hù)、開環(huán)檢測(cè)、輸入掉電保護(hù)、輸出欠壓過壓保護(hù)、軟啟動(dòng)等功能。由芯片UCC28019 工作原理知其輸出PWM 波形占空比是根據(jù)電壓環(huán)路的反饋電壓輸入到Vsense 腳與芯片內(nèi)部+5 V 基準(zhǔn)電壓進(jìn)行比較, 經(jīng)差分放大后改變PWM 斜率。系統(tǒng)穩(wěn)定時(shí)Vsense 腳的電壓為5 V.電阻R7、R8分壓,通過控制D/A 的輸出來控制UCC28019 的Vsense 腳電壓, 進(jìn)而控制最終的輸出,即數(shù)字設(shè)定輸出。D/A 轉(zhuǎn)換器采用16 位數(shù)模轉(zhuǎn)換器MAX541。
1)電感電流檢測(cè)電阻的選取
在電感電流超過最大值電流25%時(shí),ISENSE 腳電壓達(dá)到軟過流保護(hù)閥值的最小值,RSENSE將觸發(fā)軟過流保護(hù)。RSENSE應(yīng)滿足如下條件:

其中VSOC(min)=0.66 V。I L_PEAK(max)為最大峰值電流。
此外,為保護(hù)芯片免受沖擊電流的沖擊,在ISENSE 腳處串聯(lián)一個(gè)阻值為的220 Ω 電阻(如圖2 中的R1)。
2)輸入濾波電容的選取
在允許有20%的電感電流紋波IRIPPLE和6%的高頻電壓紋波U IN_PIPPLE的情況下,輸入濾波電容的最大值Cin由輸入電流紋波IRIPPLE和輸入電壓紋波U IN_RIPPLE(max)決定。輸入濾波電容的值可通過以下公式計(jì)算:

其中fsw =65 K,ΔI RIPPLE =0.2,IRIPPLE =ΔIRIPPLE I IN_PEAK (max),ΔV IN_RIPPLE =0.06,V IN_RECTIFED (max) = √2 V IN (max) ,V IN_RIPPLE (max) =ΔVIN_RIPPLE V IN_RECTIFED(max)
3)升壓電感的選取。
升壓電感的最小值根據(jù)最壞的情況(占空比D 為0.5)計(jì)算得出:

系統(tǒng)主回路如圖2 所示。
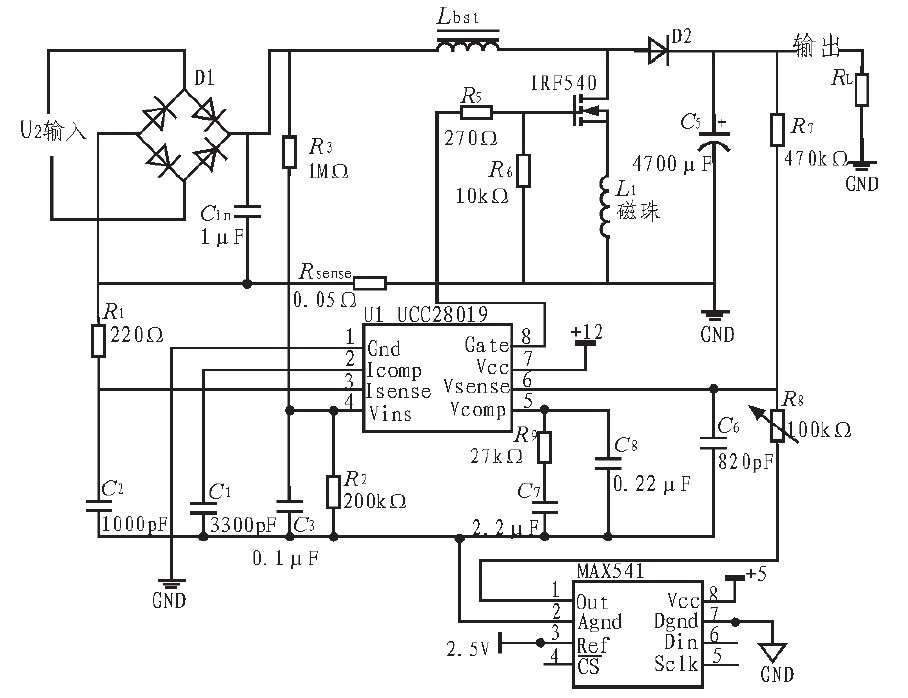
圖2 主回路
2.3 功率因數(shù)測(cè)量電路設(shè)計(jì)
采用相位差測(cè)量法。利用電壓電流互感器分別對(duì)電壓、電流信號(hào)進(jìn)行提取, 然后用精密儀表放大器INA118 對(duì)電壓電流進(jìn)行放大至飽和,經(jīng)TLC372 整形后,測(cè)出相位差,相位差Φ 的計(jì)算原理是利用輸入2 路信號(hào)過零點(diǎn)的時(shí)間差,以及信號(hào)的頻率來計(jì)算2 路信號(hào)的相位差,首先測(cè)量單路輸入信號(hào)頻率,方法是記錄1 路方波信號(hào)2 次連續(xù)上升沿觸發(fā)的定時(shí)器計(jì)數(shù)值N1和N2,計(jì)算出2 次上升沿計(jì)數(shù)器差值ΔN1=N1-N2, 以定時(shí)器工作頻率fclk為參考, 求出輸入信號(hào)的頻率為Fin= fclk ΔN1 .運(yùn)用TI 低功耗單片機(jī)MSP430F449 的捕獲功能,捕獲2 路信號(hào)的過零點(diǎn),記錄定時(shí)器這一時(shí)刻的計(jì)算值,計(jì)算出它們之間的時(shí)間差。TI 公司的所有的FLASH 型單片機(jī)都含有Timer_B,它是程序的核心,Timer_B 由1 個(gè)16 位定時(shí)器和多路比較/ 捕獲通道組成,2 路信號(hào)的相位差,Δ=360°×Δt Ti其中,ΔN2為2 路信號(hào)的上升沿分別觸發(fā)計(jì)數(shù)器的差值;Ti為輸入信號(hào)的周期。由相位差的計(jì)算可簡(jiǎn)化為:ΔΦ=360°×Δt ΔN1 =360°×ΔN2 ΔN1×fclk , 為防止計(jì)數(shù)器溢出,參考時(shí)鐘設(shè)置為1 MHz,測(cè)相時(shí)最大計(jì)數(shù)值為1000 000/50=20 000<2∧16-1=65 535;且每次測(cè)相前都對(duì)計(jì)數(shù)器B 清零。最后經(jīng)余弦運(yùn)算即可測(cè)得功率因數(shù)。負(fù)載端輸出電壓、電流經(jīng)采樣可算出系統(tǒng)視在功率。根據(jù)公式P=S×cosθ,Q=分別計(jì)算出電源的有功功率、無功功率。該方法操作簡(jiǎn)單、可達(dá)到很高的精度。電路如圖3 所示。
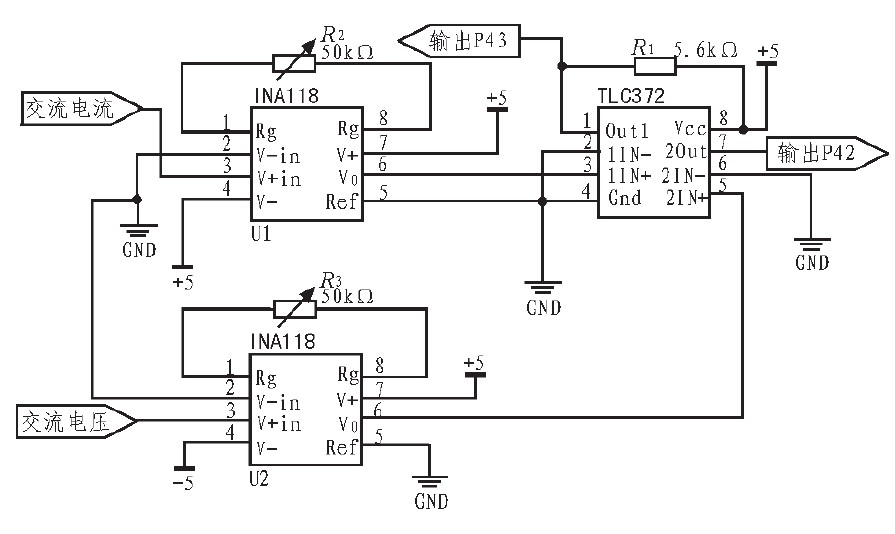
圖3 功率因數(shù)測(cè)量
2.4 過流保護(hù)電路的設(shè)計(jì)
通過單片機(jī)實(shí)時(shí)采樣輸出電流,當(dāng)電流過大時(shí)單片機(jī)控制繼電器模塊使其斷開,系統(tǒng)斷電;當(dāng)故障排除后測(cè)得電流值小于預(yù)設(shè)定值時(shí)單片機(jī)再次發(fā)指令使繼電器閉合。電路重新正常工作。電路如圖4 所示。
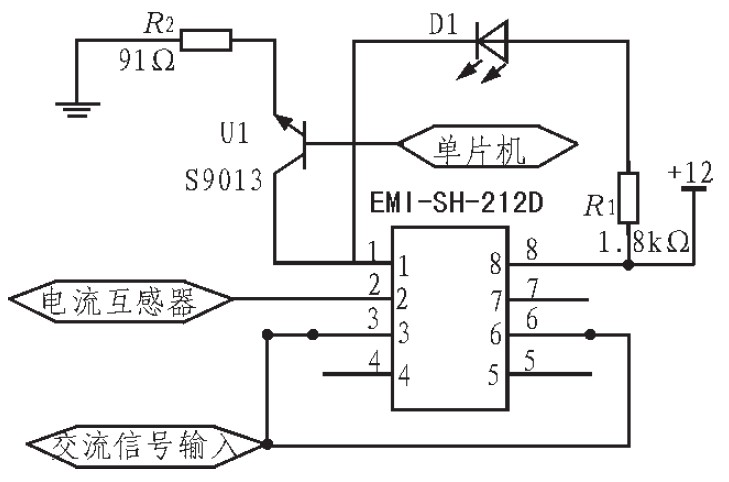
圖4 過流保護(hù)
3 系統(tǒng)軟件設(shè)計(jì)
本系統(tǒng)選用MSP430F449 低功耗單片機(jī), 負(fù)責(zé)電壓電流的相位檢測(cè)、功率因數(shù)及電壓電流峰值的顯示、以及相應(yīng)外部請(qǐng)求對(duì)電壓值進(jìn)行調(diào)整。相位檢測(cè)用MSP430 定時(shí)器的捕獲功能實(shí)現(xiàn)。首先對(duì)一路電壓信號(hào)測(cè)頻,外部信號(hào)的上升沿到來時(shí)觸發(fā)中斷,記錄當(dāng)前定時(shí)器計(jì)數(shù)器的數(shù)值,由兩次定時(shí)器數(shù)值的差值,計(jì)算出信號(hào)的頻率。然后測(cè)兩路信號(hào)相位差,開始啟動(dòng)電壓信號(hào)的捕獲功能;當(dāng)捕獲到該路信號(hào)的上升沿并進(jìn)入中斷后,立刻啟動(dòng)定時(shí)器計(jì)數(shù),開啟電流信號(hào)的捕獲功能,禁能電壓信號(hào)的捕獲功能。當(dāng)捕獲到電流信號(hào)的上升沿并進(jìn)入中斷后,記錄當(dāng)前定時(shí)器計(jì)數(shù)器的數(shù)值,由此便可計(jì)算出電壓、電流的相位差,從而算出功率因數(shù)。程序中,TimerA 的外部引腳用于按鍵檢測(cè),故用TimerB 的捕獲比較器實(shí)現(xiàn)[6].用MSP430 自帶的AD 對(duì)電壓、電流信號(hào)采樣,采樣模式為序列通道多次轉(zhuǎn)換, 以便實(shí)時(shí)顯示當(dāng)前的電壓、電流值。當(dāng)檢測(cè)到輸出電流超過2.5 A 時(shí),控制繼電器的關(guān)斷和電路的復(fù)位。流程如圖5 所示。
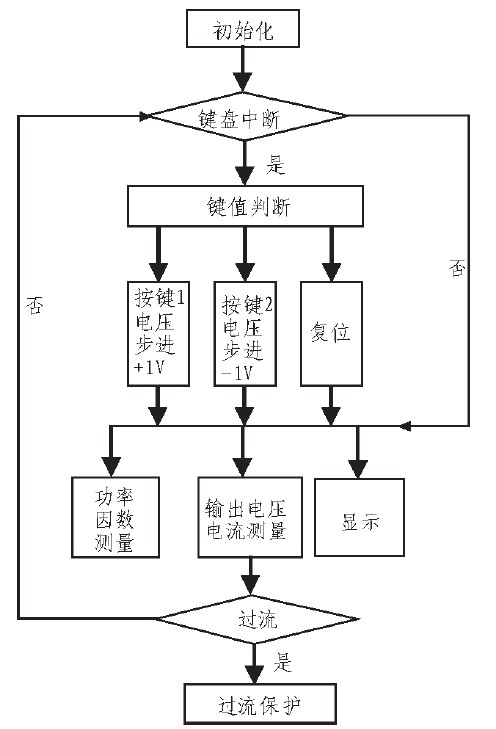
圖5 軟件流程圖
4 測(cè)試數(shù)據(jù)與分析
4.1 測(cè)試儀器
15 MHz 函數(shù)信號(hào)發(fā)生器,型號(hào)為Agilent33129A.數(shù)字示波器,型號(hào)為Tektronix TDS 1002,雙通道,60 MHz .萬用表的型號(hào)為FLUKE17B。
4.2 測(cè)試方案及結(jié)果如下
按照基本要求預(yù)置電壓設(shè)為36 V,當(dāng)負(fù)載變化時(shí),輸出電壓理論值應(yīng)不變恒為36 V,輸出電流會(huì)隨著負(fù)載的變化而變化。實(shí)際中由于各種誤差的存在,輸出電壓和預(yù)置電壓多少會(huì)有一些差距。檢測(cè)實(shí)際輸出電壓電流,和理論值比較。
變壓器副邊電流通過電流I2互感器經(jīng)電阻采樣后送示波器顯示,測(cè)其失真度。
采樣電壓電流經(jīng)比較器后可以測(cè)得得到相位差,經(jīng)余弦運(yùn)算既得功率因數(shù)。減小負(fù)載使得輸出電流增大, 當(dāng)達(dá)到2.5 A 時(shí),檢測(cè)繼電器是否調(diào)轉(zhuǎn),若跳轉(zhuǎn)則過流保護(hù)功能可靠。
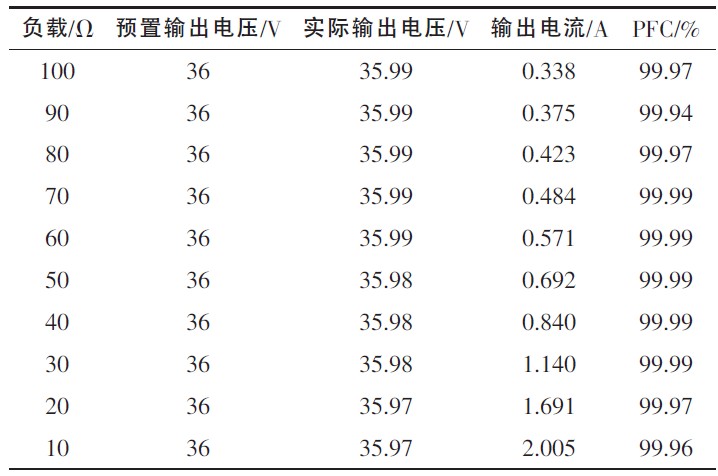
1)預(yù)置輸出電壓不變(36 V)時(shí),改變負(fù)載,測(cè)得實(shí)際輸出電壓、電流和功率因數(shù)如表1 所示。
表1 負(fù)載變化時(shí)的電源參數(shù)
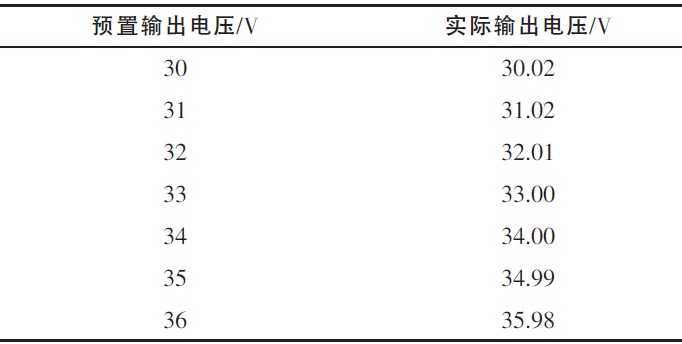
2)輸出電壓數(shù)字可調(diào)。通過按鍵預(yù)置輸出電壓,測(cè)量實(shí)際輸出電壓如表2 所示。
表2 輸出電壓數(shù)字調(diào)節(jié)
4.3 測(cè)試結(jié)果分析
測(cè)試數(shù)據(jù)顯示,功率因數(shù)高達(dá)0.999 以上,測(cè)量誤差的絕對(duì)值低于0.84%.測(cè)相時(shí),兩路信號(hào)經(jīng)比較器之前先進(jìn)行了飽和放大,讓信號(hào)的幅值盡量靠近,這樣減小了比較誤差,在采用MSP430 測(cè)相,時(shí)鐘可能會(huì)引來誤差,但是參考時(shí)鐘頻率較高(1 MHz),時(shí)鐘頻率非常穩(wěn),輸入信號(hào)頻率低(50 Hz),在測(cè)相計(jì)數(shù)的過程中可能有的差距,多計(jì)一個(gè)數(shù)(或者少計(jì)一個(gè)數(shù)),會(huì)給測(cè)得的相位差帶來的偏差,該誤差完全可以忽略不計(jì),但在輸入信號(hào)頻率較高時(shí),該誤差不能忽略。輸出電壓數(shù)字調(diào)節(jié)測(cè)量時(shí),實(shí)際值和理論值有一定誤差,但誤差較小,在允許的范圍內(nèi)。
5 結(jié)束語
本系統(tǒng)較好地設(shè)計(jì)和實(shí)現(xiàn)了高功率因數(shù)的直流電源,電源波形畸變非常小,電源效率高,電質(zhì)量得到改善。目前電能是使用最多的能源之一, 如果電能的使用效率得以提高,那么可以大大減少對(duì)能源的浪費(fèi)。基于低功耗單片機(jī)MSP430的高功率因數(shù)電源有待進(jìn)一步深究,有望融入日常生活。低污染、高效率、綠色化、低應(yīng)力、低輸出紋波,這是市場(chǎng)對(duì)新型電源的要求。本系統(tǒng)還有很大的發(fā)展空間,可以嘗試與太陽能、風(fēng)能相結(jié)合。<