
物流中心自動引導小車(AGV)控制系統由AGV智能控制模塊、監視模塊、及無線網絡通訊模塊等三大部分組成。工作過程是通過接入互聯網的手機或者微機客戶端通過無線網絡向遠程的AGV發送控制指令代碼,期間傳輸信號由發送端使用加密狗加密。當信號經互聯網發送到接收終端時,AGV網絡模塊把接受的指令傳送到處理器,處理器指示驅動模塊驅動AGV執行動作。運動的同時監視模塊把采集到的圖像通過無線互聯網傳輸到客戶機端,其整體結構如圖1所示。
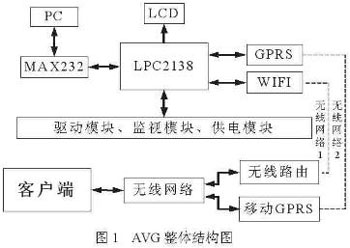
1.1 智能控制模塊
這部分是AGV的核心部分。采用的是嵌入式系統設計,可以準確高效地運行及處理數據。控制器通過網絡組件WIFI或者GPRS與外部網絡進行數據通訊,用戶可以使用家用寬帶網絡或者手機短信的方式實現模塊的遠程控制。同時在本地控制還可以應用紅外無線鍵盤、數字液晶屏來提供本地人機交流界面。
1.2 網絡模塊
AGV無線網絡通訊模塊是AGV通訊信號傳輸的重要組成部分,由WIFI或者GPRS模塊來實現通訊。通訊中介是家用無線路由或者移動網絡GPRS。
1.3 監視模塊
AGV監視模塊通過單片機驅動舵機實現全方位的監視。視頻信號通過攝像頭來采集,信號轉換后將視頻的PAL信號傳輸至處理器,經無線網絡傳輸實時傳到客戶端。攝像頭的控制與智能控制模塊連接,攝像頭的運動受控制模塊的控制。
1.4 驅動模塊
AGV驅動模塊是通過可編碼的直流電機來驅動的。當處理器接收到客戶端傳來的指令,處理器對驅動模塊信號處理。從而實現AGV的全方位移動。
2 系統硬件設計
本文采用的是PHILIPS單片32位ARM微控制器LPC2138,作為控制器的處理器,負責和WIFI、GPRS無線通訊模塊、監視模塊、數據存儲、鍵盤、紅外、顯示屏等模塊進行數據通訊和對無線網絡客戶端發送的信號進行采集和處理。
2.1 控制核心模塊
ARM外圍電路包括電源鍵盤顯示屏、SD卡、SDRAM以及與各個輔助模塊進行連接的擴展接口等。ARM處理器內嵌512k FLASH、32k的可讀寫RAM。電路中SDRAM芯片選用hy57v25641,存儲容量為16M。用其做系統運行所需內存,為操作系統信號的采集和數據的處理提供了可靠的運行空間。擴展的接口有串口、USB接口。串口為下載程序和與GPRS饃塊通訊用,USB接口用于與WIFI連接從而接入無線互聯網絡。LCD顯示屏主要與鍵盤配合完成本地人機交互界面,LCD液晶240×320像素,65k色,驅動芯片是ili9325。鍵盤采用的是PS2接口方便使用電腦鍵盤,與LCD合力完成本地人機信息交換。串口通過MAX232與上位機進行通信,輔助單片機的下載通過ISP下載,支持在線調試。
2.2 外圍網絡模塊
WIFI和GPRS模塊用于實現處理器與客戶端的通信連接。WIFI模塊采用的是wf8000-u USBWIFI模塊。GPRS模塊采用的是BENQ M22A模塊。各通訊模塊外圍電路主要由電源部分、工作指示及數據連接擴展口組成。
2.2.1 TTL電平
GPRS模塊與處理器的連接通過串口通訊,模塊與處理器間的電平均為TIL電平,所以無需進行電平轉換就可直接進行連接。
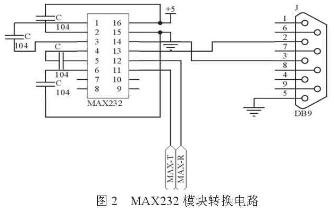
2.2.2 MAX232轉換電平
由于編程及調試控制器電腦與處理器間的電平定義不同,采用MAX232進行電平的轉換,其外圍電路主要有電源供電部分。
MAX232電平轉換模塊用來把電腦端的RS232信號處理得到TTL電平實現電腦和處理器及GPRS模塊之間的通信,電路如圖2所示。
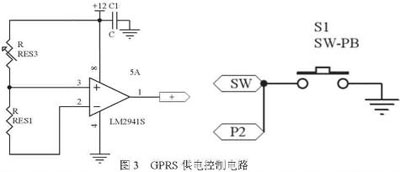
2.2.3 GPRS外圍網絡模塊
GPRS模塊第15管腳必須持續3s的低電平才能實現模塊的啟動。本文采用的是軟件模擬低電平GPRS模塊啟動。關機電路同樣是管腳持續低電平3s,電路如圖3所示。
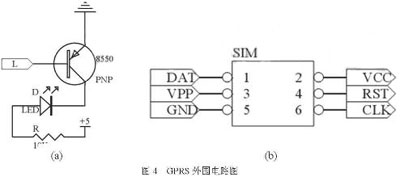
GPRS模塊第35腳是一個工作狀態指示燈接口,狀態表示分別為:亮1s滅1s為啟動搜索信號;亮1s滅2s為信號正常;持續點亮為有數據輸入或者輸出。其工作原理圖如圖4(a)所示。圖4(b)為GPRS模塊SIM卡連接示意圖。
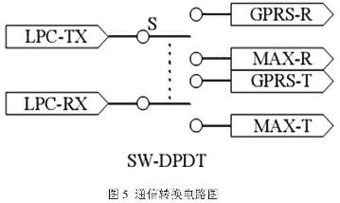
GPRS模塊串口工作方式的電平為TTL電平,所以GPRS模塊和控制核心處理器的連接可以是直接連接。但考慮到模塊的調試及程序的燒錄,所以在GPRS模塊與處理器連接處使用轉接開關。以此完成電腦到處理器的通信、GPRS模塊到電腦的通信。GPRS模塊、處理器、電腦的通信電路連接示意圖如圖5所示。
3 監視模塊
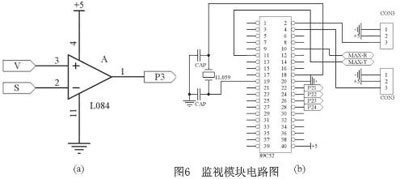
監視模塊采用的是普通高清視頻攝像頭,分辨率達1024×768。視頻采用PAL模式傳輸經處理器處理,通過無線互聯網把圖像傳輸到客戶端,其電路圖如圖6(a)所示。攝像頭的各方位由單片機驅動舵機來實現舵機驅動電路如圖6(b)所示。
4 驅動模塊
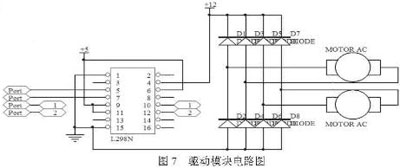
驅動模塊采用的驅動芯片為L298N該芯片功率大,電源可直接采用12V。單個芯片可以控制兩個直流電機,本文采用兩片L298N 以實現自動引導小車(AGV)的各方位移動。電路如圖7所示。
5 電源模塊
電源部分采用的是12V直流鋰電池,功率為10W。對各個模塊部分進行分別供電。穩壓管采用的是7805。由于GPRS對電源要求特別高,所以單獨采用一個LM2941S對其供電。
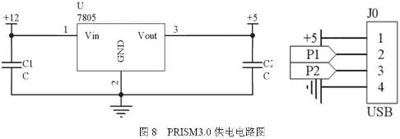
wf8000 WIFI模塊是華為公司生產的一種專門用于嵌入式系統的無線網絡模塊,其符合802.11b標準,芯片采用prism3.0。原理圖如圖8所示。
6 結論
利用本控制系統,可以實現AGV的遠程控制及工作環境實時監控。結合運輸機械裝置可以實現在特殊工作環境下的智能遠程控制搬運工作。在物流中心等一些環境較差的場所可以代替人工作實現更多的功能,為貨物搬運工作帶來便利。