
引言
機器人技術是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術,是當代研究十分活躍,應用日益廣泛的領域。機器人的應用情況,是一個國家工業自動化水平的重要標志。?
Java3D是美國Sun公司為了彌補Java語言在多媒體及圖形編程方面的不足而推出的一系列標準擴展API,Java3D的推出使Java開發人員具備了開發三維視覺的小應用程序和應用程序,這些程序還具有與客戶交互的能力。這使得Java在視覺上,互動性上產生了一次飛躍。
基于Java3D的這種特性,本文在利用Java3D便利的,面向對象的三維圖形程序設計來實現對工業機器人的建模與遠程控制。
一 工業機器人技術簡介
現代機器人的歷史是從1959年美國英格伯格和德沃爾制造出世界上第一臺工業機器人開始的。機器人的發展大致經歷了三個成長階段。第一代為簡單個體機器人,第二代為群體勞動機器人,第三代為類似人類的智能機器人。?
機器人的外形是多種多樣的,往往決定于它的功能,工作環境等,但有一個共同點:服從人類指令,代替人力自動工作。當然,由于機器人的智能仍然有限,所以某些特殊的場合仍然需要人類對其進行必要的控制,例如探測機器人。美國著名科普作家艾薩克.阿西莫夫為機器人提出了三條原則,即“機器人三定律”:?
第一定律——機器人不得傷害人,或任人受到傷害而無所作為;?
第二定律——機器人應服從人的一切命令,但命令與第一定律相抵觸時例外;?
第三定律——機器人必須保護自身的安全,但不得與第一、第二定律相抵觸。?
這些“定律”構成了支配機器人行為的道德標準,機器人必須按人的指令行事,為人類生產和生活服務。?
工業機器人是機器人家族中最重要的成員,它廣泛地被應用于各種自動化的生產線上。工業機器人由操作機(機械本體)、控制器、伺服驅動系統和檢測傳感裝置構成。操作機基本上分為兩大類:一類是操作本體機構,它類似人的手臂和手腕,配上各種手爪與末端操作器后可進行各種抓取動作和操作作業,工業機器人主要采用這種結構。另一類為移動型本體結構,主要目的是實現移動功能,主要有輪式、履帶式、足腿式結構以及蛇行、蠕動、變形運動等機構。壁面爬行、水下推動等機構也可歸于這一類。控制器通常是由幾級計算機系統構成,通過對各個傳感器發回的信息進行計算后再發出相應的指令。侍服驅動系統由驅動單元和侍服驅動控制器兩個部分組成,侍服驅動控制器負責控制驅動單元帶動操作機朝減少偏差的方向動作。檢測傳感裝置的作用是將各種外界環境參數發回控制器,例如溫度,氣壓,受力等,這使得機器人能夠與周圍環境保持密切聯系,對外界的各種變化做出及時的應變。?
二?JAVA3D技術
在Java語言推出并大獲成功后,Sun公司開始考慮如何建立一個真正完整強大的Java平臺。其中達成的一個共識就是要強化Java1.0內核平臺中功能有限的圖形API。Sun公司在Java1.1將內核增強了不少,但始終缺了一點什么。好在Sun公司與其合作伙伴很快開發出了Java Media和Communication API,彌補了Java在多媒體編程方面的缺憾。其中兩個最大的弱項,2D和3D圖形部分,分別由Java 2D,3D API填補了空白。不過,Java2D API從Java1.2起是作為內核平臺的API出現的,而Java3D則是在Java1.2推出后的稍晚些時候作為擴展API出現的。
Java3D的推出使Java開發人員具備了開發三維視覺的小應用程序和應用程序,這些程序還具有與客戶交互的能力。這使得Java在視覺上,互動性上產生了一次飛躍。
Java3D的API屬于低階的API,這些低階API為在場景圖結構中建立3D幾何體提供了一種規范的,獨立于底層硬件的方法,并提供了場景預編譯等優化技術。這些API按作用可分為幾個大的模塊:基本場景圖和形體,形體的分組和幾何變換,3D圖形文件的導入,光照和材質等等。這幾個部分之間的關系如下圖所示:
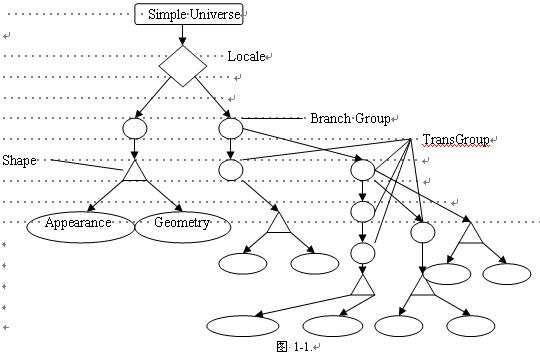
由上圖可知,Java3D的場景構成可以有豐富的組合,而本文中機器人的操作機正是利用這種組合構造起來的。
三 利用Java3D實現工業機器人計算機模擬的建模
在建模之前,需要進行總體外形的設計,繪制出草圖,確定各個構件的外形尺寸以及各個關節轉動副之間的距離。這一點非常重要,因為這決定了在虛擬空間中各個構件的相對運動是否協調,合理。這一步完成后就可以進行部件3D模型的建立。
在Java3D中要構造一個復雜形體(Shape)大體上有兩種辦法。一種是利用Java3D中自有的API產生基本形體,然后再將這些基本形體組合。或者計算出這個復雜形體的各個頂點,然后利用生成面的API來形成這個形體。這種使用Java3D API來生成形體的方法,優點是對形體的操作比較方便,可以使形體在運行中產生變化。缺點在于這種建立3D模型的方法不直觀,調試形狀比較麻煩。另一種方法就是利用Sun公司或其他機構為Java3D開發的Loader來載入其他格式存儲的3D模型,這些模型可以在諸如Maya,3Dmax,AutoCad等3D生成工具中可視化地生成。這種方法的優點顯而易見,那就是建模非常簡便,缺點在于在程序運行中這些模型的形狀是不能改變的。因為本文是對工業機器人進行模擬,所以一些柔性的附件可以省略,余下的均為剛性部件,不會產生形變,所以采用后一種方法是適宜的。
本文中機器人所有部件的3D模型均由3Dmax建模,輸出為Vrml97格式,然后利用VRML97-Java工作組提供的Vrml97 Loader導入虛擬空間中。 在建立部件模型的過程中需要注意的主要問題是要把形體的坐標系原點調整到這個部件的轉動軸心處,這樣在裝配這些部件時就能比較容易地將其轉動軸心調整至關節轉動副軸線處。導入3D模型需要用到com.sun.j3d.loaders.vrml97.VrmlLoader和com.sun.j3d.loaders.Scene兩個由Sun公司提供的類,其中VrmlLoader提供了用于載入圖形文件的方法,Scene對象則用來容納載入的圖形。當Scene的對象中賦以圖形對象后,可使用TransformGroup對象裝載該圖形對象中的3D模型,以便于今后對該3D模型的方位調整。整個過程如下:
???????? Scene scene=null;
???????? VrmlLoader loader=new VrmlLoader();
???? TransformGroup module=new TransformGroup();
???????? module.setCapability(TransformGroup.ALLOW_TRANSFORM_READ);
???????? module.setCapability(TransformGroup.ALLOW_TRANSFORM_WRITE);
???????? try
???????? {
?????????????????????? scene=loader.load(fileName);//fileName為外部圖形文件名,本文中
???????????????????????????????????? //使用的為vrml文件*.wrl。
?????????????????????? module.addChild(scene.getSceneGroup());
???????? }
???????? catch(Exception e)
???????? {
??????????????? System.err.println(e);
??????????????? System.exit(0);
???????? }
當機器人各個部件建模完成并導入場景后,便可以利用Java3D中形體變換類 TransformGroup,Transform3D來組裝這些部件。但是這里存在兩個問題,那就是如何組裝才能使每一個部件自身的運動對其他部件的影響如何才能正確體現出來,并且這些部件能夠正確動作?
對于第一個問題,我們先舉人的手臂為例來說明什么是一個部件對另一個部件的正確影響。當人的上臂活動時,小臂應當隨著上臂移動,而小臂活動時,上臂未必動作。而本文模擬的工業機器人的運動基本與此相似。在Java3D中這個問題可以利用其構成場景圖的特點來解決。具體方法是將動作從屬于部件A的部件B的transformGroupB加入到A的transformGroupA中。其關系類似于圖1-1中所示,transformGroupB及其子節點都成為transformGroupB的子節點。這樣,當transformGroupA動作時,其所有子節點將同時動作,這也就實現了我們最初的目的。
而第二個問題中所謂正確的動作是指各個部件能繞正確的軸心轉動。本文中虛擬的機器人沒有平移運動,只利用各個關節的轉動來實現運動目的。因此這些部件正確的運動,最根本的問題是轉動的軸心位置要正確。
在Java3D中,物體的方位設置通常是通過TransformGroup和Transform3D兩個類實現的。每個TransformGroup對象都有自己的一個坐標系,所有作為子節點加入到這個對象中的形體的位置都以這個坐標系為基準,而這個坐標系同時也代表了這個TransformGroup對象在父節點的坐標系中的空間位置和方向。這個TransformGroup對象如果要調整在父節點中的方位,只需要利用Transform3D對象來調整該對象的坐標系位置即可。調整坐標系位置大體上有兩種途徑,一是直接設置該調整的變換矩陣,這種方法的優點是步驟簡單快捷,缺點是矩陣的計算比較復雜,不易把握尺度;二是通過Transform3D類提供的各種方法來達到目的,這種方法的優點是比較直觀,更易于理解,不需要復雜的計算,而缺點在于為了實現比較復雜的運動需要配合多個子TransformGroup對象。本文中將采取第二種方法,以便讀者能更直觀地理解該機器人的運動實現過程。
在組裝這些部件的3D模型時,每一個形體必須載入到一個transformGroup中,由于這一形體上可能有需要運動的子形體,而該子形體運動的基準位置通常是在其父形體上的轉軸孔處。因此這里產生了一個問題,一個transformGroup對象中需要有兩個坐標系,一個用于該級形體在父形體中的定位,另一個作為子形體運動的基準。為了解決這個問題,可以為每一級形體建立一個container,這個container將容納由外部文件導入的形體,以及坐標系調整到下級形體轉軸處的一個Axis對象,這樣將下一級形體的container加入到這個Axis對象中,即可使下一級形體轉動的軸心處于正確位置。一級形體與其下級形體之間的關系如下圖所示:
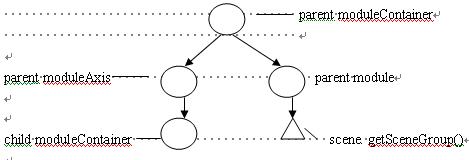
下圖是已組裝好的機器人:

四 ?遠程控制的實現
機器人的建模部分完成了,接下來的工作是完成機器人的遠程控制部分。本文以本地的機器人對象模擬遠程控制的監視窗口,通過Java Socket將本地的控制信息同步的傳送到Applet遠程端,那里也實現了一個機器人對象,用來模擬實際的操作機。這里為了簡化問題,并沒有設置遠程端反饋的回路,而是控制端設置為服務器發送消息,遠程端設置為客戶端接收消息。
該控制系統控制端與遠程端的結構分別如左下圖和右下圖所示:
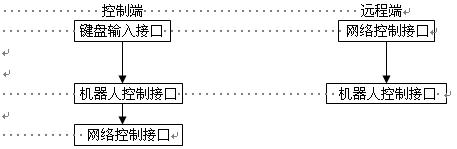
????其中控制端的鍵盤輸入接口通過繼承Java3D的Behavior類實現,這個接口將喚醒條件設置為按下按鍵,然后通過本地實現的processStimulus方法分析輸入情況,隨后根據輸入參數調用相應的機器人控制接口使機器人做出響應。
控制端與遠程端的機器人控制接口是基本相同的。由于機器鉗部分是由兩個部件組成,而這兩個部件的行為總是對稱的,這與其他的部分有顯著不同,因此控制接口使用了方法重載來分別處理這兩種情況:
public void rotArm(float delta);//處理機械鉗的運動
public void rotArm(int code,float delta);//其他部件的運動是相似的,故可用一//個方法來實現
在rotArm方法中,部件的運動是通過對Container做坐標變換實現的:
Transform3D t=new Transform3D();
t.rotY(delta);// 部件沿哪一根軸轉動根據其初始位置來決定
moduleContainer.setTransform(t);
在控制端中,對本地對象變換的同時,rotArm方法調用了網絡控制接口。
netIo.send(code,delta);
??
控制端的網絡接口基于ServerSocket,在接口中設置有接口狀態標志,初始值為接口不可用,當連接建立后,該標志被置為接口可用。消息在發送之前將按照控制協議格式化,遠程端在接收到控制消息后,將其解碼,然后調用機器人控制接口,實現遠程機器人的控制。遠程端的網絡接口是基于Socket的,在程序啟動時初始化。控制端與遠程端的網絡接口均繼承了Thread多線程類,控制端中子線程用于等待遠程端連接,而遠程端中則用于持續接收控制端消息。
五 參考文獻
1.? Steven Holzner 著,江帆,鄭偉,郭春 等譯,JAVA2技術內幕,中國水利水電出版社。
2.? Bruce Eckel 著,候捷譯,Java編程思想,機械工業出版社。?
3.? Cay S.Horstmann,Gary Cornell著,李如豹,剛冬梅 等譯,Java2核心技術 卷I:原理,機械工業出版社。
4.? David R. Nadeau,An Introduction to Programming AR and VR Applications with Java 3D,http://www.sdsc.edu/~nadeau/nadeau_courses.html。
5.? 顧雷,劉鵬,房冰,都志輝 編著,都志輝 主編,劉鵬,陳渝 副主編,Java3D編程實踐,清華大學出版社。
6.? Harvey M.Deitel,Paul J. Deitel,Sean E.Santry 著,錢方,梅皓,周璐,吳志英 等譯,高級Java2大學教程,電子工業出版社。
7.? 賴維德?,工業機器人技術,??www.e-works.net.cn/ewkArticles/Category68/Article6938.htm。
8.? 機器人的誕生,www.cpus.gov.cn/kjsh/jqrsh/jqrdds.htm。
9.? www.siasun.com/jsfw/jsjz.htm。
10. Getting Started with the Java 3D API,java.sun.com/products/java-media/3D/ collateral。